navigation using an appearance based topological map
Olaf Booij, Bas Terwijn, Zoran Zivkovic and Ben Kröse
In proceedings of the IEEE International Conference on Robotics and Automation(ICRA), 2007.
Abstract
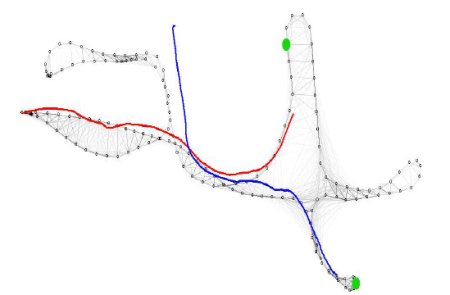
Vision systems are used more and more in 'per- sonal' robots interacting with humans, since semantic infor- mation about objects and places can be derived from the rich sensory information. Visual information is also used for building appearance based topological maps, which can be used for localization. In this paper we describe a system capable of using this appearance based topological map for navigation. The system is made robust by using the epipolar geometry and a planar floor constraint in computing the necessary heading information. Using this method the robot is able to drive robustly in a large environment. We tested the method on real data under varying environment conditions and compared performance with a human-controlled robot.
Downloads
pdf (297 kb)
video (28 mb, mpg v1)