Two view pose estimation assuming planar camera motion
A lot of geometric and topological vision based mapping systems use estimates of relative camera poses given pairs of images. Most systems use least squares schemes, combined with RANSAC and bundle adjustment to estimate the most likely poses. A huge amount of papers have been written, and still are, proposing refinements and extensions to this scheme. During the first three years of my phd I pursued this same goal (i.e. getting such refinements published). However, it does not seem to be that important to strive for a "mathematically perfect" estimation method. The very successful RatSLAM system, for example, uses a rather simple heuristic method to estimate camera poses.
Near the end of my phd (that is: as a paid phd .. argh), I developed a new estimation method, which is much simpler and more efficient than the proposed maximum likelihood based methods. It is still based on sound probabilistic reasoning as opposed to most heuristic methods (although I did not compare its accuracy to these methods!).
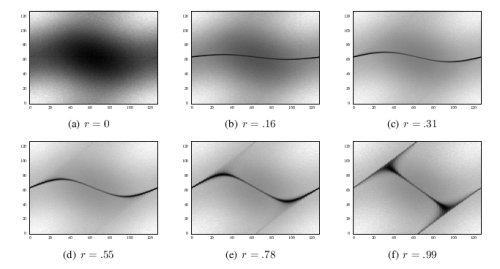
I use the fact that the solution space of possible relative camera poses is small, given that the camera is mounted on a robot that drives over a planar surface. This allows the likelihood function of point correspondences to be learned as a look-up-table, which can be used very efficiently for estimating poses.
I first tried to publish it at ICRA (2010). Luckily, the reviewers rejected it, which gave me the opportunity to resend it to the Robotics Science and Systems conference, see my rss paper. At the presentation I used these slides.
This work became the main contribution of my thesis (Chapter 3). After the RSS publication, I continued working on the method and used it to estimate the probability that two images are depicting the same scene. This new work became Chapter 4 of my thesis.
I should, some day, apply these methods on a big outdoor dataset, write a paper about it, and become very famous. However, as my thesis promoter told me: that paper will never be written.